
机上でシミュレーションを行いパラメータを設定
本機と比較して操舵感が離れないよう動きと操舵感を重視
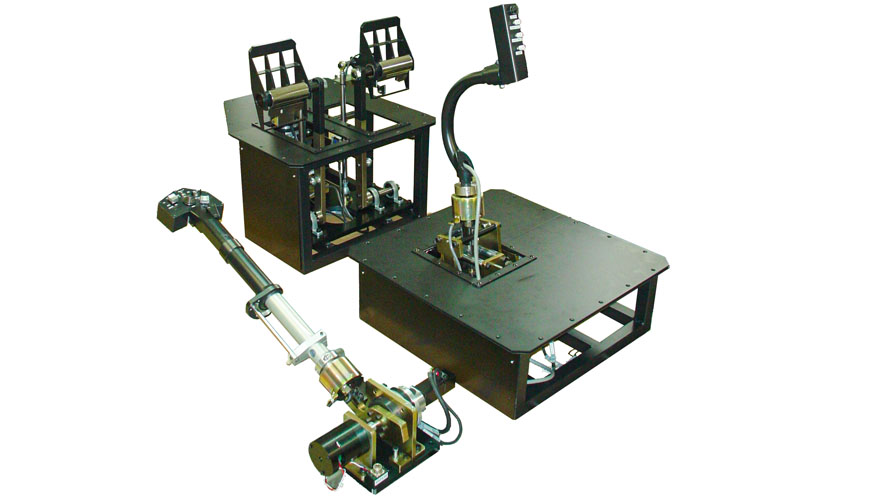
- 機構はコレクティブスティック(上図左)・サイクリックスティック(同右)・ヨーペダル(同奥)で構成
ご用意いただいた定盤に埋まる状態で納品 - パイロット向けのシミュレーションシステムと比較すると大幅に廉価でありながら
オートパイロット、手動運転、オーバーライドなどのシミュレーションが可能 - フィーリングはバネ負荷、粘性負荷等をインビータンス制御により再現
仕様
制御方式
電動制御
制御軸
サイクリック・スティック、コレクティブ・スティック、ヨー・ペダル
制御モード
自動操舵、自動操舵時のオーバーライド、手動操舵
お問い合わせ


個人情報の扱いについてはプライバシーポリシーをご参照ください。